


This research has two objectives:
1) To develop algorithms for plausible and legallyjustifiable freeway car-following and arterial-street gap acceptance driving behavior for AVs
2) To implement these algorithms on a representative road network, in order to generate representative drive cycles for AVs that are both theoreticallygrounded and based on empirical driving conditions.
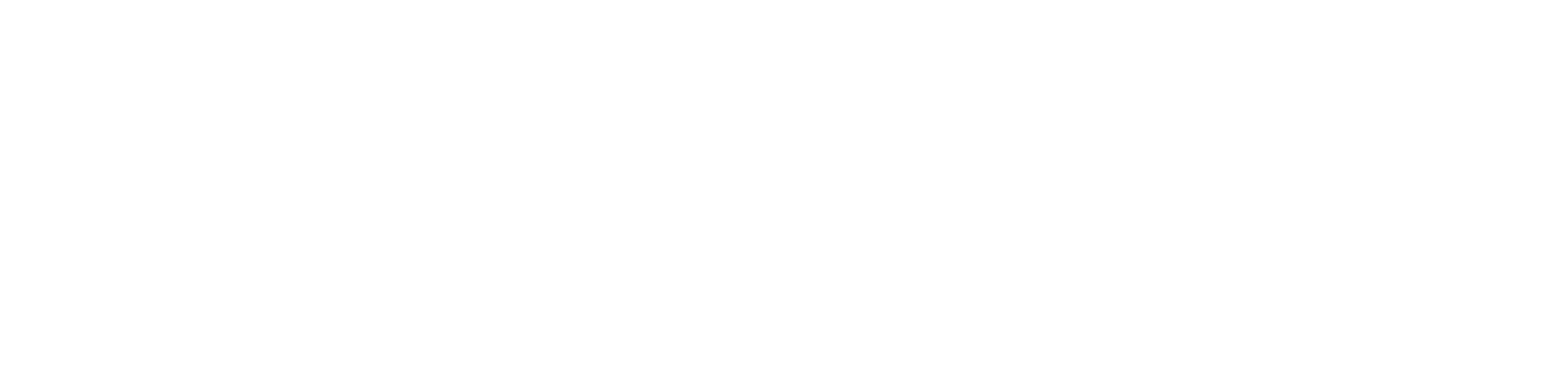
The theory underpinning the colloquial concept of defensive driving is known as Assured Clear Distance Ahead. ACDAcompliant driving strategies were initially implemented for AVs (in the specific context of queue discharge at signalized intersections) in research recently undertaken by the study team. This research focused on two contexts: freeway ‘pipeline’ and intersection-turning-movements.